
Мы с нетерпением ждем возможности предоставить вам профессиональные услуги.-Лидер Чжунда


-
-
-
Gleichstrom-Bürstenloser Getriebe motor
Planeten-Gleichstrom-Getriebe motor
Kleiner Wechselstrom-Getriebe motor
ZDF2, ZDF3 Hypoid-Getriebe motor
RV Cyclo idal Pin Rad reduzierer
PRODUKTE
Das Unternehmen ist ein nationales High-Tech-Unternehmen, das an der Ausarbeitung von 6 nationalen und industriellen Standards, 2 "Made in Zhejiang"-Standards und 89 Patenten beteiligt ist. Es besitzt ein Forschungs-und Entwicklungs zentrum für Unternehmen auf Provinz ebene in Zhejiang und sein führendes Produkt ist als "Zhejiang Famous Brand Products" anerkannt. Die umfassende Stärke zählt zu den Top 20 Industrie unternehmen in Cixi.
Detail
Roboter-Modus ZDGT5023 Freiheit 6 Position Bodeninstallation und hängend
DeckeninstallationMaximale Betriebsdrehzahl J1-Achse 125°/sec J2-Achse 110°/sec J3-Achse 145°/sec J4-Achse 276°/sec J5-Achse 259°/sec J6-Achse 274°/sec Maximaler Betriebsbereich J1-Achse ±180° J2-Achse -135°~+100° J3-Achse -80°~+180° J4-Achse ±180° J5-Achse ±115° J6-Achse ±360° Maximaler Aktionsradius 2340mm Maximale Endlast 50Kg Körpergewicht Etwa 530Kg Erlaubtes Drehmoment J4 206N ·m J5 206N ·m J6 127N ·m Erlaubtes Trägheitsmoment J4 28kg-m² J5 28kg ·m² J6 11kg ·m² Wiederholgenauigkeit ±0.08mm Roboter-Basismasse 420×620mm Umgebungstemperatur 0~45℃ Relative Luftfeuchtigkeit 20~80%RH Luftdruck 89KPa~106KPa (Höhe unter 1000m) Vibration, Schlag, Kollision ≤0.5G Schutzgrad P54 (Handgelenk IP67) ■ Arbeitsbereichsdiagramm
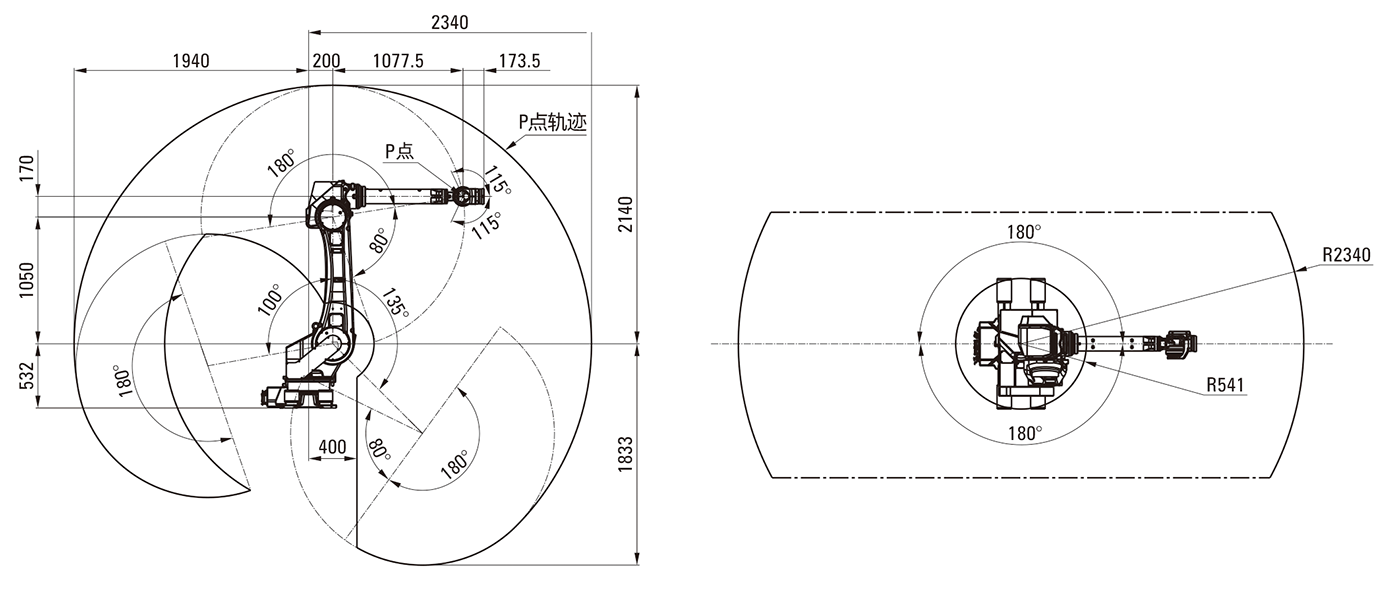
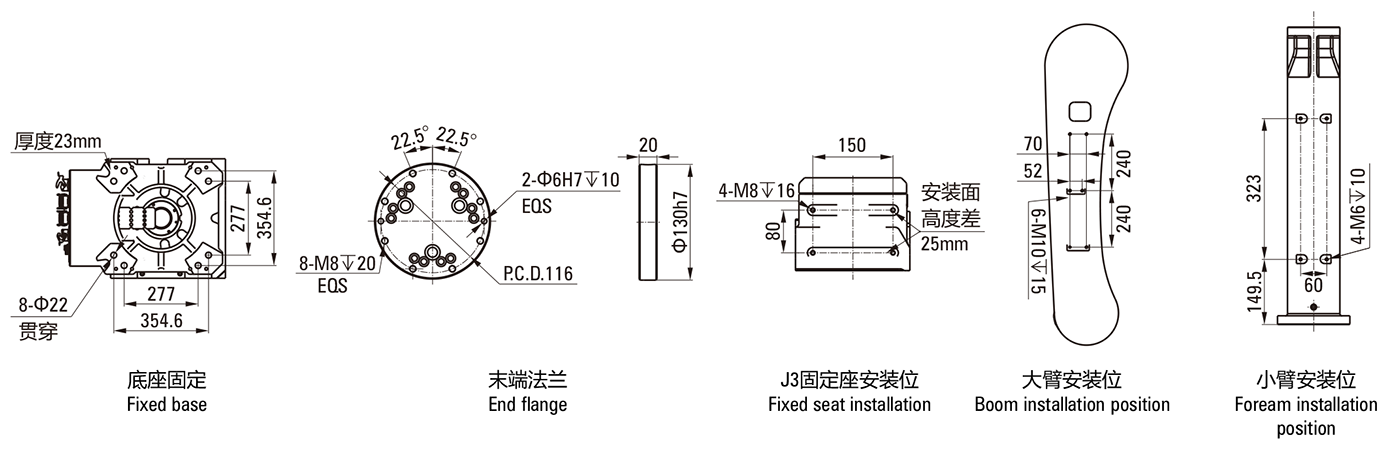
■ Installationsschnittstellendiagramm
■ Trägheitstensor des Verbindungsstabs relativ zum Schwerpunkt
Objekt Basis Komponenten Auslegerkomponenten Kleiner Arm fester Sitz
KomponentenKleiner Arm
KomponentenHandgelenk Beratung Koordinatensystem 0 Koordinatensystem 1 Koordinatensystem 2 Koordinatensystem 3 Koordinatensystem 4 Koordinatensystem 5 lxx(Kgmm²) / 7.0×10⁶ 6.0×10⁶ 1.2×10⁶ 4.8×10⁶ 1.2×10⁵ lyy(Kgmm²) / 8.6×10⁶ 6.2×10⁷ 1.9×10⁶ 4.8×10⁶ 3.9×10⁴ lzz(Kgmm²) / 7.4×10⁶ 5.8×10' 2.4×10⁶ 7.3×10⁴ 9.5×10⁴ ■ Gelenkverbindung
Gelenk J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 Kopplungsbeziehungsgleichung
(Kopplungskoeffizient)/ / / 41 41 41 ■ Reduziererparameter
Modell 200C 380D 120C 80D 42D 35BX Reduzierer-Übersetzungsverhältnis 34.86 47.03 36.75 33 41 41 Umfassendes Übersetzungsverhältnis 142.02 162 121.06 86.88 92.7 87.35 Nenn-Ausgangsdrehzahl (U/min) 15 15 15 15 15 15 Nenn-Drehmoment (N ·m) 1961 3724 1176 784 412 217 Zulässiges Drehmoment zum Starten
und Stoppen (N ·m)4900 9310 2450 1960 1029 533 Momentanes maximales Drehmoment (N ·m) 9800 18620 4900 3920 2058 1083 Momentsteifigkeit (N·m) 8820 7050 2450 2150 1660 822 Momentanes maximales Drehmoment (N ·m) 17640 14100 4900 4300 3220 1764 ■ Motorparameter
Gelenk J1 J2 J3 J4 J5 J6 Motormodell 180 180 130 100 100 100 Nennleistung (kW) 4.6 4.6 1.8 1 1 1 Nennspannung (V) 380 Nennstrom (A) 18 18 6.9 3.7 3.7 3.7 Nennmoment (N·m) 29.2 29.2 11.5 3.18 3.18 3.18 Nennspeed (U/min) 1500 1500 1500 3000 3000 3000 Maximale Geschwindigkeit (U/min) 3000 3000 3000 4000 4000 4000 Rotorträgheit (*10e-4kgm²) 60 60 18 4.3 4.3 4.3 Rückführung
elektromotorische Kraftkoeffizient (V/Krpm)111 111 110 62 62 62 Anzahl der Polpaare 5 Encoder 17-Bit-Multiturn-Isolationswert Tamagawa-Vereinbarung VERWANDTE PRODUKTE
NACHRICHTEN
Wenn Sie Fragen haben, können Sie uns eine Nachricht hinterlassen. Wir haben Profis, um Ihnen zu antworten. Bitte geben Sie die richtigen Kontakt informationen ein!
Kontakt
Ningbo Zhongda Leader intelligente Übertragung Co., Ltd.
Hinzufügen.: Nr. 185 Xinxing 1. Straße, Cixi High-Tech-Industrie
Entwicklungs zone, Ningbo
Tel:86-574-63537171
Fax:86-574-63534879
WhatsApp:86-19136773454
E-Mail: Trade20@zd-motor.comFolgen Sie uns in den sozialen Netzwerken:





Urheberrecht©Ningbo Zhongda Leader Intelligent Transmission Co., Ltd. Powered by www.300.cn SEO Geschäfts lizenz
-
{kind=link}