
Мы с нетерпением ждем возможности предоставить вам профессиональные услуги.-Лидер Чжунда


-
-
-
Gleichstrom-Bürstenloser Getriebe motor
Planeten-Gleichstrom-Getriebe motor
Kleiner Wechselstrom-Getriebe motor
ZDF2, ZDF3 Hypoid-Getriebe motor
RV Cyclo idal Pin Rad reduzierer
PRODUKTE
Das Unternehmen ist ein nationales High-Tech-Unternehmen, das an der Ausarbeitung von 6 nationalen und industriellen Standards, 2 "Made in Zhejiang"-Standards und 89 Patenten beteiligt ist. Es besitzt ein Forschungs-und Entwicklungs zentrum für Unternehmen auf Provinz ebene in Zhejiang und sein führendes Produkt ist als "Zhejiang Famous Brand Products" anerkannt. Die umfassende Stärke zählt zu den Top 20 Industrie unternehmen in Cixi.
Detail
Der ZDFH0614Industrierobotersteht an der Spitze der modernen Fertigung und bietet unvergleichliche Präzision und Effizienz. Dieser fortschrittliche Roboter nutzt modernste Technologie, um einen reibungslosen und zuverlässigen Betrieb in einer Vielzahl von industriellen Anwendungen zu gewährleisten. Mit seinem hochmodernen Design bietet er verbesserte Leistung und Langlebigkeit, was ihn ideal für Branchen macht, die strenge Standards verlangen.
In der Automobilindustrie glänzt der ZDFH0614 bei Aufgaben, die schnelle und hochpräzise Bewegungen erfordern. Seine überlegenen Steuerungsalgorithmen ermöglichen eine nahtlose Integration in verschiedene Automatisierungssysteme, wodurch eine genaue Positionierung und Geschwindigkeitsregelung sichergestellt wird. Dieses Maß an Präzision ist entscheidend für Prozesse wie Montagebänder, Materialhandling und Schweißen, bei denen selbst geringfügige Abweichungen zu Qualitätsproblemen oder Ausfallzeiten führen können.
Energieeffizienz ist ein entscheidendes Unterscheidungsmerkmal des ZDFH0614. Durch die Minimierung von Energieverlusten trägt dieser Roboter zu reduzierten Betriebskosten und einer geringeren Umweltbelastung bei. Sein effizientes Energiemanagement verlängert nicht nur die Lebensdauer der angeschlossenen Motoren, sondern reduziert auch die Wärmeentwicklung, was die Gesamtzuverlässigkeit des Systems erhöht. Dies macht ihn besonders wertvoll in Branchen, die auf Nachhaltigkeit und Kosteneffizienz setzen.
Vielseitigkeit ist ein weiteres Markenzeichen des ZDFH0614. Er wurde entwickelt, um mehrere Kommunikationsprotokolle zu unterstützen und lässt sich mühelos in verschiedene industrielle Netzwerke integrieren. Ob klassische Feldbusse oder moderne industrielle Ethernet-Standards, dieser Roboter gewährleistet nahtlose Kommunikation und einfache Einrichtung. Diese Anpassungsfähigkeit ermöglicht es den Nutzern, ihre Systeme ohne wesentliche Änderungen aufzurüsten und bietet eine zukunftssichere Lösung.
Sicherheitsmerkmale sind integraler Bestandteil des ZDFH0614 und beinhalten Überstromschutz, thermisches Management und Fehlersdiagnose. Diese Sicherheitsmechanismen schützen sowohl den Roboter als auch die angeschlossenen Geräte, verhindern Schäden und gewährleisten einen kontinuierlichen Betrieb unter widrigen Bedingungen. Dieses robuste Sicherheitskonzept gibt den Bedienern Sicherheit und erhöht die Gesamtzuverlässigkeit industrieller Prozesse.
Benutzerfreundliche Schnittstellen haben im ZDFH0614 Priorität. Intuitive Steuerungen und klare Anzeigen vereinfachen Konfiguration, Überwachung und Fehlersuche. Diese Benutzerfreundlichkeit minimiert den Schulungsaufwand und maximiert die Produktivität, sodass die Bediener sich auf kritische Aufgaben konzentrieren können, anstatt sich durch komplexe Einstellungen zu navigieren. Die einfache Schnittstelle stellt sicher, dass selbst unerfahrene Benutzer den Roboter mit Vertrauen bedienen können.
Zusammenfassend lässt sich sagen, dass der ZDFH0614 Industrieroboter im Bereich der modernen Fertigung aufgrund seiner Präzision, Effizienz, Vielseitigkeit und benutzerzentrierten Gestaltung herausragt. Er erfüllt die sich entwickelnden Bedürfnisse zeitgenössischer Industrien und bietet eine zuverlässige und nachhaltige Lösung, die die betriebliche Exzellenz verbessert. Während die Industrien weiterhin Innovationen annehmen, bleibt der ZDFH0614 ein Grundpfeiler des Fortschritts und treibt die Zukunft der Automatisierung voran.
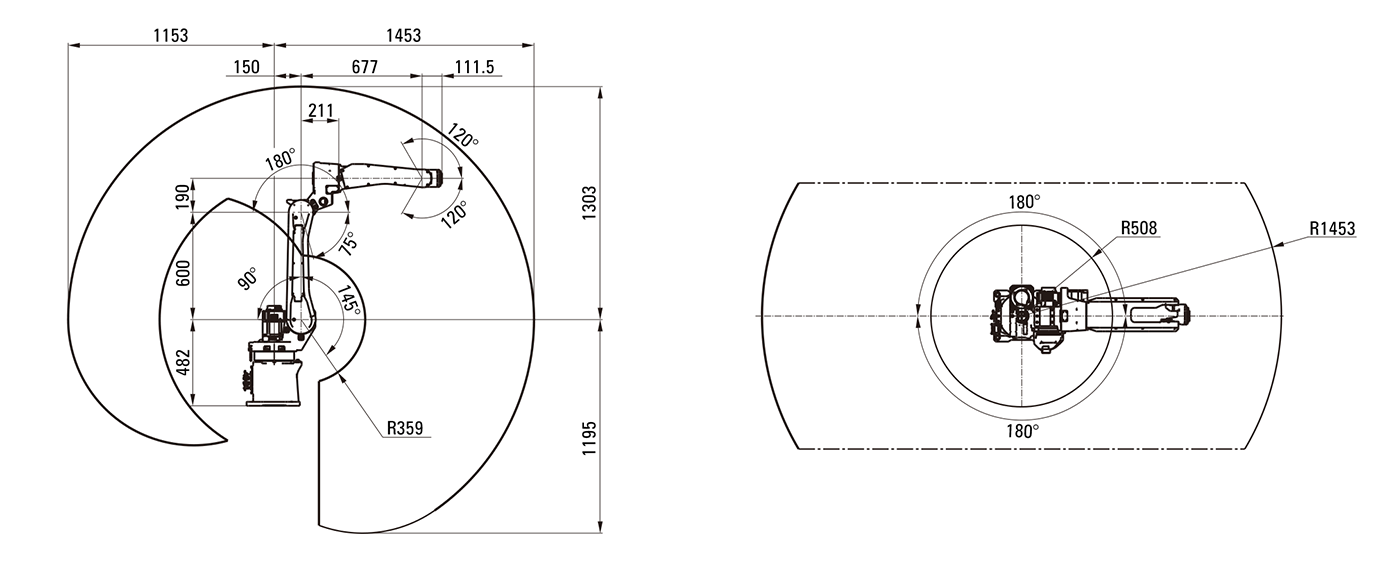
Roboter-Modell ZDFH0614 Freiheit 6 Position Bodeninstallation und hängend
DeckeninstallationMaximale Betriebsdrehzahl J1-Achse 165°/sec J2-Achse 155°/sec J3-Achse 335°/sec J4-Achse 290°/sec J5-Achse 315°/sec J6-Achse 925°/sec Maximaler Betriebsbereich J1-Achse ±180° J2-Achse -145°~+90° J3-Achse -75°~+180° J4-Achse ±170° J5-Achse ±120° J6-Achse ±360° Maximaler Aktionsradius 1453mm Maximale Endlast 6Kg Körpergewicht Etwa 125Kg Erlaubtes Drehmoment J4 10.5N ·m J5 10.5N ·m J6 5.9N ·m Erlaubtes Trägheitsmoment J4 0.28kg ·m² J5 0.28kg ·m² J6 0.06kg ·m² Wiederholgenauigkeit +/-0.05mm Roboter-Basismasse -290×300mm- -Umgebungstemperatur- -0~45℃- -Relative Luftfeuchtigkeit- -20~80%RH- -Luftdruck- -89KPa~106KPa(unterhalb von Meereshöhe von1000m)-
-Höhe unterhalb von1000m--Vibration, Schlag, Kollision- -≤0.5G- -Schutzgrad- -IP54(Gelenk IP65)- -■ Arbeitsbereichsdiagramm-
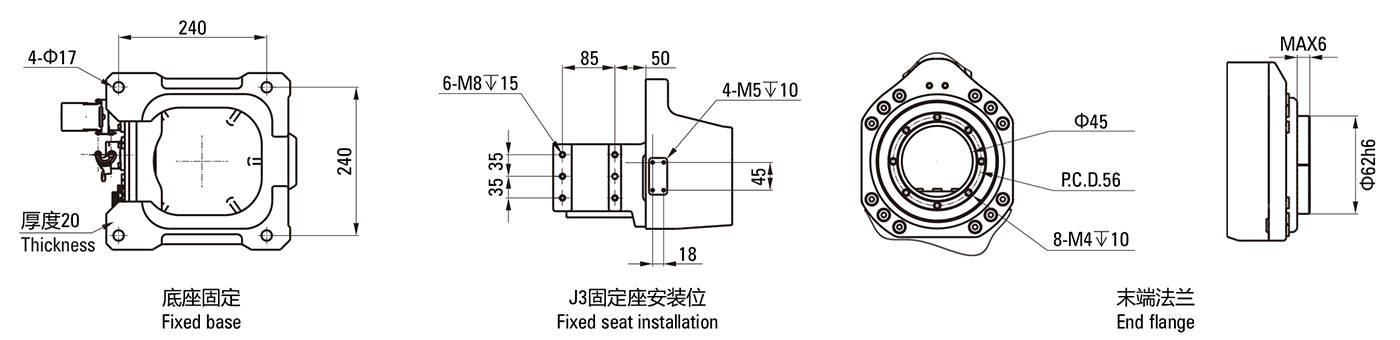
-■ Installationsschnittstellendiagramm-
-Trägheitstensor des Verbindungsstabs relativ zum Schwerpunkt-
-Objekt- -Basis- -Drehstuhl-
-Komponenten--Boom-Komponenten- -Kleiner Arm fester Sitz-
-Komponenten--Kleiner Arm-
-Komponenten--Handgelenk- -Beratung- -Koordinatensystem0- -Koordinatensystem1- -Koordinatensystem2- -Koordinatensystem3- -Koordinatensystem4- -Koordinatensystem5- -lxx(Kgmm²)- / -1.8×10⁶ - -2.3×10⁶ - 5.3×10⁵ 3.8×10⁴ 1.1×10⁴ lyy(Kgmm²) / 2.0×10⁶ 2.2×10⁶ 6.4×10⁵ 7.2×10⁵ 9.3×10³ lzz(Kgmm²) / 7.8×10⁵ 1.0×10⁵ 3.7×10⁵ 7.3×10⁵ 3.9×10³ Gelenkverbindung
Gelenk J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 Kopplungsbeziehungsgleichung
(Kopplungskoeffizient)/ / / / / 11.7 Reduziererparameter
Modell 50C 42D 25D 32 Harmonisch 20 Harmonisch Getriebe Reduziererübersetzungsverhältnis 32.54 105 81 50 50 / Umfassendes Übersetzungsverhältnis 97.62 104 80 102 102 35.1 Nenn-Ausgangsgeschwindigkeit (r/min) 15 15 15 40 25 / Nennmoment (N ·m) 490 412 245 76 34 / Zulässiges Moment zum Starten
(und Stoppen) (N ·m)1225 1029 612 216 74 / Momentanes maximales Moment (N ·m) 2450 2058 1225 382 127 / Momentsteifigkeit (N ·m) 1764 1660 784 / / / Momentanes maximales Moment (N ·m) 3528 3320 1568 / / / Motorparameter
Gelenk J1 J2 J3 J4 J5 J6 Motormodell 130 130 80 60 40 40 Nennleistung (kW) 1.5 1.5 0.75 0.4 0.1 0.1 Nennspannung (V) 220 Nennstrom (A) 7 7 5 2.6 0.85 0.85 Nennmoment (N ·m) 4.77 4.77 2.38 1.27 0.31 0.31 Nennspeed (r/min) 3000 3000 3000 3000 3000 3000 Maximale Geschwindigkeit (r/min) 3200 3200 4100 5000 5000 5400 Rotorträgheit (*10e-4kgm²) 9 9 1.2 0.4 0.06 0.06 Leitung zurück
(elektromotorische Kraftkoeffizient) (V/Kpm)48 48 36.2 33 25.2 25.2 # der Polpaare 5 Encoder (17-Bit-Multiturn-Isolationswert Tamagawa-Vereinbarung) VERWANDTE PRODUKTE
NACHRICHTEN
Wenn Sie Fragen haben, können Sie uns eine Nachricht hinterlassen. Wir haben Profis, um Ihnen zu antworten. Bitte geben Sie die richtigen Kontakt informationen ein!
Kontakt
Ningbo Zhongda Leader intelligente Übertragung Co., Ltd.
Hinzufügen.: Nr. 185 Xinxing 1. Straße, Cixi High-Tech-Industrie
Entwicklungs zone, Ningbo
Tel:86-574-63537171
Fax:86-574-63534879
WhatsApp:86-19136773454
E-Mail: Trade20@zd-motor.comFolgen Sie uns in den sozialen Netzwerken:





Urheberrecht©Ningbo Zhongda Leader Intelligent Transmission Co., Ltd. Powered by www.300.cn SEO Geschäfts lizenz
-
{kind=link}